Robot 3 (Programação)
Programação do robot
")
")
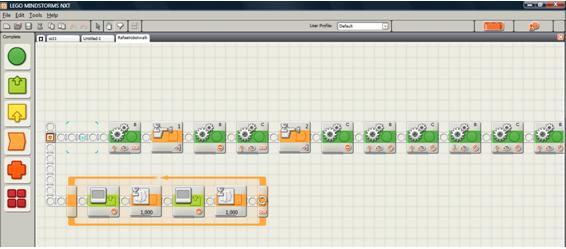
José Castanheira nº18, Tiago Santo nº26, Rafael Oliveira, Filipe Vicente (10ºC, 2009/2010, Clube de Ciências Experimentais)___________________________________________________________________________
Robot 4
 No Clube de Ciências Experimentais aprendemos a programar um robot simples utilizando equipamento LEGO MINDSTORM e o seu software gráfico NXT.O robot obedecia à instrução de se movimentar, utilizando os seus motores eléctricos, até encontrar uma cor vermelha com o seu sensor de luz. Experimentámos também o sensor de distância e o sensor de som, através de condições simples a que o robot reagiria.
No Clube de Ciências Experimentais aprendemos a programar um robot simples utilizando equipamento LEGO MINDSTORM e o seu software gráfico NXT.O robot obedecia à instrução de se movimentar, utilizando os seus motores eléctricos, até encontrar uma cor vermelha com o seu sensor de luz. Experimentámos também o sensor de distância e o sensor de som, através de condições simples a que o robot reagiria.
José Castanheira nº18, Tiago Santo nº26 (10ºC, 2009/2010, Clube de Ciências Experimentais)___________________________________________________________________________
Robot 3 (Construção)

Objectivo
Construção do robot AlphaRex.
Materiais
 – Peças de Lego Mindstorm NTX
– Peças de Lego Mindstorm NTX
– Sensores Lego Mindstorm


Carlos Tavares nº2, Diana Nunes nº4, João Toco nº14 (ÁREA de PROJECTO 12º C – 2009/2010)
___________________________________________________________________________________________
Robot 2
Objectivo
O objectivo geral deste trabalho é desenvolver um sistema que informe aos robots construídos com o kit Lego Mindstorm sua posição no ambiente. Assim, terá como objectivos específicos: Desenvolver um sistema de visão computacional para encontrar os robots no seu ambiente; e desenvolver um sistema de transmissão de dados entre o computador que faz a visão computacional e os robots.
Materiais
Peças de Lego Mindstorm NTX
Sensores Lego Mindstorm
Carlos Tavares nº2, Diana Nunes nº4, João Toco nº14
(ÁREA de PROJECTO 12º C – 2009/2010)
___________________________________________________________________________
Robot 1
O robot é constituído por peças da LegoMindstorm, 4 fios transmissores e o NXT.
 Nesta montagem o robot possui um sensor de cor que faz parar o robot ao atingir a linha vermelha.
Nesta montagem o robot possui um sensor de cor que faz parar o robot ao atingir a linha vermelha.
 Posteriormente o robot foi programado para poder virar para a esquerda ou para a direita.
Posteriormente o robot foi programado para poder virar para a esquerda ou para a direita.
 O uso do sensor de cor permite a distinção de 5 cores: Vermelho, Azul, Amarelo, Verde e Preto.
O uso do sensor de cor permite a distinção de 5 cores: Vermelho, Azul, Amarelo, Verde e Preto.
 O programado utilizado para mover o robot é o LegoMindstorm NXT2.0.
O programado utilizado para mover o robot é o LegoMindstorm NXT2.0.

Carlos Tavares nº2, Diana Nunes nº4, João Toco nº14 (ÁREA de PROJECTO 12º C – 2009/2010)
_________________________________________________________________________
O funcionamento de um robot
O que distingue um robot de outro tipo de mecanismo é a autonomia, ou seja, a capacidade de decidir de acordo com as instruções introduzidas aquando da sua programação. Para que o processador possa decidir necessita de receber informações do ambiente que o rodeia, estas informações são providenciadas pelos sensores existentes no robot.
Define-se robot como um dispositivo programável multifunctional, projectado para mover materiais, objectos, ferramentas ou aparelhos específicos através de vários movimentos programados com vista à realização de determinadas tarefas.
Atendendo a esta definição, só estaremos perante um robot quando houver possibilidade de realizar tarefas, normalmente associadas a movimentos (trabalho mecânico) e esses movimentos forem controlados pela própria máquina. A situação actualmente mais comum nos robots industriais, por exemplo, é o controlo através de um processador incorporado na máquina, previamente programado.
Carlos Tavares nº2, Diana Nunes nº4 (ÁREA de PROJECTO 12º C – 2009/2010)
_________________________________________________________________________
O Software utilizado

Carlos Tavares nº2, Diana Nunes nº4 (ÁREA de PROJECTO 12º C – 2009/2010)
_________________________________________________________________________
A robótica
A robótica é um ramo da tecnologia, que engloba a mecânica, computação e electrónica. Actualmente trata-se de sistemas compostos por máquinas e partes mecânicas com circuitos integrados que vemos regularmente utilizadas no nosso dia-a-dia.
A maioria das pessoas pensa que quando falamos de robótica trata-se de coisas do futuro. Mas não podemos generalizá-la apenas a robots, porque ela está presente no nosso dia-a-dia, nos nossos carros, na nossa própria casa, etc.
A robótica tem como objectivo a automatização de tarefas que podem ser realizadas pelo homem. Ou seja “pôr um robot a fazer o nosso trabalho” de modo a facilitar as tarefas do homem e aumentar a produtividade de certas empresas.
Os robots estão, cada vez mais, presentes no nosso dia-a-dia. Esta tecnologia tem sido adoptada ao longo do tempo pela indústria. Pode-se substituir o trabalhador comum por uma máquina que faz o mesmo trabalho, mais rapidamente e com menos custos. Por isso, têm sido um êxito no aumento da produtividade, redução dos custos, e problemas com funcionários.
Esta ideia de construir um robot para substituir o homem começou a ganhar força no início do século XX com a grande necessidade de aumentar a produtividade e a qualidade dos produtos. Foi nesta mesma época que começaram a surgir as primeiras aplicações para o robot industrial.
João Toco nº14 (12º C – ÁREA de PROJECTO – 2009/2010)
_______________________________________________________________________________
Breve História da Robótica
Os primeiros protótipos de robots surgiram na civilização grega, quando ainda não havia necessidades práticas nem económicas que justificassem a existência deste tipo de aparelhos.
Foi Leonardo DaVinci, com a sua investigação acerca da anatomia humana, que abriu o caminho para o complexo mundo dos robots. Como resultado do seu estudo surgiram diversos bonecos com articulações de modo a conseguirem mexer as mãos, os olhos e as pernas e a realizar simples acções como escrever ou tocar alguns instrumentos musicais.
Os robots começaram a ser desenvolvidos mais seriamente durante o século XVIII, na indústria têxtil, com o aparecimento dos primeiros teares mecânicos.
Devido ao contínuo desenvolvimento da indústria, os robots foram aperfeiçoados, de modo a satisfazer as necessidades existentes. Contudo, a criação de verdadeiros robots não foi possível antes de aparecerem os primeiros computadores, em 1940.
O primeiro robot industrial foi o “Unimates”, que foi desenvolvido no final da década de 50. Joe Engleberger é considerado o “pai da robótica”, devido à criação do primeiro robot comercial.
Diana Nunes (nº4) e Carlos Tavares (nº2), 12-C, (ÁREA de PROJECTO 12º C – 2009/2010
_______________________________________________________________________
Visita de Estudo
No dia 27 de Novembro de 2009 as turmas A e C do 12ºano da área de Ciências e Tecnologias realizaram uma visita de estudo ao Instituto Politécnico de Setúbal, instituto no qual se lecciona uma grande variedade de engenharias, como por exemplo electrónica, informática, ambiental, mecânica, biomédica entre outras.
Entre os vários laboratórios que visitámos, interessou-nos mais o Laboratório de Robótica pois o nosso trabalho, a desenvolver em Área de Projecto, será sobre este tema.

Carlos Tavares nº2, Diana Nunes nº4, João Toco nº14
(ÁREA de PROJECTO 12º C – 2009/2010)_________________________________________________________________________________
Orientação: Professora Laila Ribeiro
Apoios: ![]()
_________________________________________________________________________________

{kind=link}
{kind=link}
Deixe um comentário